-

8 Literature Review Games for Students
Diving into literature doesn't have to be a snooze fest! With the right classroom review games, you can turn those...
-

How Vaping Helps Improve Your Reading Experience
As you settle into your favorite reading nook with a book in one hand, you might want to consider the...
-
Top Books on Blockchain and Cryptocurrency for Bitcoin Casino Enthusiasts
In the fast-evolving world of blockchain and cryptocurrency, staying informed is crucial for enthusiasts, especially those engaged in the exciting...
-
5 Books about Vaping That Are Worth Reading
After spending a long day, it’s great to unwind with a good book and a trusty vape pen. If you...
-

Top 5 Best GRE Prep Books in 2024
Passing a GRE test is the last step towards getting into a world-class graduate program. A big part of the...
-
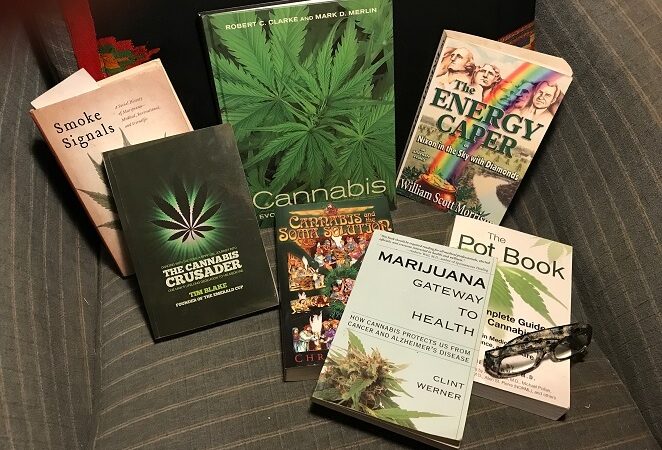
4 Best Cannabidiol Books for In-Depth Knowledge
The issue with CBD oil Canada is that there's too much to know, but concrete information is difficult to come...
-
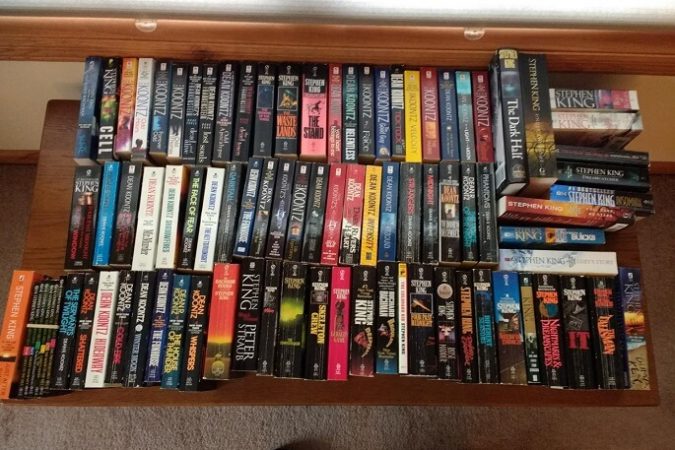
The 16 Best Dean Koontz Books for the Chills
Demon Seed (1973) Technology's advancement, without human-like ambition motivating it, is terrifying enough. And this is not limited to things...
-
What March Has to Offer
Countless must-reads are hitting the shelves every month. There’s a lot more than we can name here. But, no matter...
-
The Best Mysteries and Thrillers of March
March brought mystery and thriller novel fans that will keep them reading for hours on end: Eight Perfect Murders by...
-

Weekend Reading
For months, we won’t be having any choice but to stay inside. For months, every day is going to feel...
-

The Best Children’s Books of 2019
We’ve written down 2019’s top reads that made the year a blast for children. Parents are grateful for these books...
-
Mysteries Set in the World of Books
Readers must be missing bookstores now more than ever, but we have no choice but to stay behind closed doors...
-
8 Literature Review Games for Students
Diving into literature doesn't have to be a snooze fest! With the right classroom review games, you can turn those...
-
How Vaping Helps Improve Your Reading Experience
As you settle into your favorite reading nook with a book in one hand, you might want to consider the...
-
Top Books on Blockchain and Cryptocurrency for Bitcoin Casino Enthusiasts
In the fast-evolving world of blockchain and cryptocurrency, staying informed is crucial for enthusiasts, especially those engaged in the exciting...
-
5 Books about Vaping That Are Worth Reading
After spending a long day, it’s great to unwind with a good book and a trusty vape pen. If you...
-
Top 5 Best GRE Prep Books in 2024
Passing a GRE test is the last step towards getting into a world-class graduate program. A big part of the...
-
4 Best Cannabidiol Books for In-Depth Knowledge
The issue with CBD oil Canada is that there's too much to know, but concrete information is difficult to come...
-
The 16 Best Dean Koontz Books for the Chills
Demon Seed (1973) Technology's advancement, without human-like ambition motivating it, is terrifying enough. And this is not limited to things...
-
What March Has to Offer
Countless must-reads are hitting the shelves every month. There’s a lot more than we can name here. But, no matter...
-

7 Fireplace Bookshelves Ideas
People enjoy reading near a fireplace because it offers a cozy atmosphere. Fireplaces create an ideal setting for immersive reading....
-
Best Sci-Fi and Fantasy Reads of 2019
One of the good things that comes with a new year is making a list of the best reads of...
-
Spring Surprises: Sci-Fi and Fantasy Novels to Hit the Shelves in the First Quarter of 2020
Another decade has passed, and 2020 beams on the horizon with its promise to give us surprises in the sci-fi...
-
Epic Reads: The Best Sci-Fi and Fantasy Saga for 2020
The best dilemma in the universe is probably deciding which sci-fi and fantasy series to start reading next. Let us...
Featured
8 Literature Review Games for Students
How Vaping Helps Improve Your Reading Experience
Top Books on Blockchain and Cryptocurrency for Bitcoin Casino Enthusiasts
5 Books about Vaping That Are Worth Reading

Top 5 Best GRE Prep Books in 2024
4 Best Cannabidiol Books for In-Depth Knowledge
The 16 Best Dean Koontz Books for the Chills